

西北工业大学研制的滑扑一体自主变形仿生柔体潜航器成功进行首航
- 科技日报
- 2019-08-06 15:46:01

新华社西安8月5日电 (记者毛海峰 付瑞霞)随着人类对海洋资源的探索、开发和利用越发迫切,研究和发展仿生智能水下航行器成为近年来全球海洋科学领域的一大热点。日前,由西北工业大学研制的滑扑一体自主变形仿生柔体潜航器成功进行首航,标志着我国在高性能仿生智能水下航行器的研制方面迈出重要一步。
自主变形仿生柔体潜航器是科技部重点支持的研究项目,以蝠鲼为仿生原型,采用交替性滑翔与扑动的滑扑一体推进模式,在水中具有高推进效率、高机动性、高稳定性、低环境扰动、低噪音,以及大负载空间、大负载能力、海底软着陆等特点。
滑扑一体自主变形仿生柔体潜航器项目负责人、西北工业大学航海学院院长潘光对记者说,开展滑扑一体水下推进技术研究,使潜航器兼具水下航行器的高机动能力与水下滑翔机的长续航能力,可有效解决现阶段我国传统潜航器存在的机动性、隐蔽性和续航时间综合能力不足的问题。
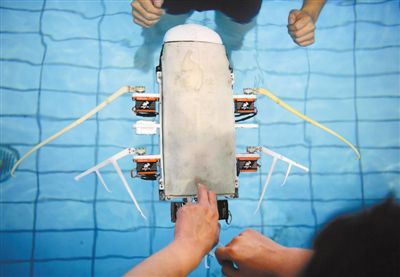
这款滑扑一体仿生柔体潜航器属于原理验证样机,翼展0.8米,由锂电池做动力,最高时速1节,能够逼真模拟蝠鲼的滑扑运动姿态。
左图 原理验证样机在西北工业大学的游泳池内展示扑动前进(8月3日摄)。
右图 8月3日,西北工业大学研究团队的学生在调试原理验证样机的内部骨架。新华社记者 邵瑞摄



















相关推荐
观众“化身”现场考古学家 不同选择走向不同剧情
中国青年报 2020/05/19
“乘风破浪”未播先火 中年女明星勇闯女团
中国新闻网 2020/05/13
“相信未来”在线义演汇聚力量,以音乐提振信心
人民网-人民日报海外版 2020/05/13
《创造营2020》口碑与热度双赢 打磨节目的“价值细节”
人民网-人民日报海外版 2020/05/13
三部网络电影接连取得佳绩 魏君子在业内声名鹊起
北京日报 2020/04/30热门资讯 日 周 总
为什么高强度运动后免疫力会短暂降低?如何运动才健康?
人民网-科普中国 2020/04/02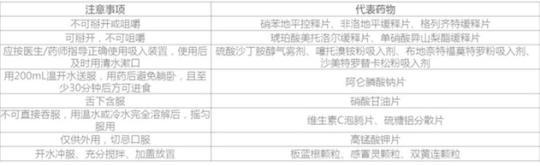
疫情期间,老年人居家如何合理用药?
光明网 2020/03/23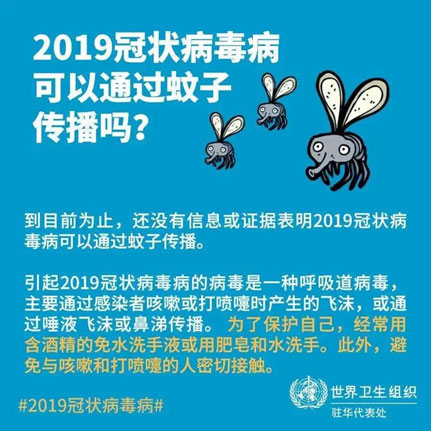
有人在身边咳嗽,我会感染新冠病毒吗?
人民网-人民健康网 2020/03/18
吃枸杞要适量 别超过这个数
中国家庭医生 2020/03/16
国家体育总局专家:应该通过健康饮食、科学健身增强免疫力
北京日报 2020/03/12
网络文学维权为何困难重重?侵权行为向隐蔽化发展
上观新闻 2020/04/27
《花千骨》游戏侵害《太极熊猫》游戏著作权 开发运营方需赔偿3000万
中国新闻网 2020/04/26
网上教学的开设却给一些不法分子制造了可乘之机
北京青年报 2020/03/18
垃圾短信的问题已强调多次为何还没有被根治?
搜狐网 2020/03/16
预付式消费问题越来越多 家用电器山寨维修不容忽视
工人日报 2020/03/16
网文内容消费的“粉丝化”趋势正成为行业发展的重要推手
北京日报 2020/02/20
今后如果更多大制作电影投奔互联网,院线难道只能喝西北风?
光明日报 2020/02/20
《我不是购物狂》青春剧与行业剧的又一题材突破口
光明日报 2020/02/20
《主持人大赛》凭借公平公正的赛制创新圈粉无数
光明日报 2020/02/20
